���@�@�@USB�ʐM�@�iVC���j�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@![]() �@�@�@�@�@�@
�@�@�@�@�@�@![]()
�@�@
���@PIC18�@CDC�N���XMicrochip����Ӄ\�t�g�@
�@�@PIC��USB�ʐM���s�Ȃ��ꍇ�A�}�C�N���`�b�v�Ђ���i���J�j����Ă��邢��USB�t���[�����[�N��CDC�N���X���g����PC���̃\�t�g��
�@RS�Q�R�QC�̑���M�̂悤�ɂ��������Ƃ��ł��܂��B���̃T���v���\�t�g���}�C�N���`�b�v�Ђ�HP�Ɍ��J����Ă��܂��B�ȉ��̃v���O�����́@
�@�}�C�N���`�b�v�Ђ�MCHPFSUSB Framework
2.3���_�E�����[�h���ĉ𓀌�PC�ɂł���@�c\Microchip Solutions\
�@USB Device - CDC - Basic Demo\PC Software ExampleVCsharp 2005�t�H���_�Ɏ��[����Ă���C#�̃T���v���v���O�����ł��B����
�@�\�t�g�́@�}�C�N���`�b�v�@ DemoBoard�iPICDEM�@FS�@USB�@DM163025�j�i��59.99�h���j�p�f���\�t�g��PC���\�t�g�ł��B�@�R�����g�s�͖|��A
�@�A�폜�A�NjL�������Ă��܂����@�A�\�[�X�R�[�h�̕ύX�͍s�Ȃ��Ă��܂���B�@�S�̂̃n�[�h�@�y��PIC���̃\�t�g�́@�S�́�PIC�����Q��
�@�肢�܂�
| �@�@�@�@�@�@ | ���v���O������ |
�@�@
delegate void SetTextCallback(string text);//�f���Q�[�g�錾
public Form1()
{
InitializeComponent();
UpdateCOMPortList(); //�g�p�\COM�|�[�g���X�g�X�V
}
private void UpdateCOMPortList() //�g�p�\COM�|�[�g���X�g�쐬
{
int i;
bool foundDifference;
i = 0;
foundDifference = false;
if (lstCOMPorts.Items.Count == SerialPort.GetPortNames().Length)
{
foreach (string s in SerialPort.GetPortNames())
{
if (lstCOMPorts.Items[i++].Equals(s) == false)
{
foundDifference = true;
}
}
}
else
{
foundDifference = true;
}
if (foundDifference == false)
{
return;
}
lstCOMPorts.Items.Clear();
foreach (string s in SerialPort.GetPortNames())
{
lstCOMPorts.Items.Add(s);
}
lstCOMPorts.SelectedIndex = 0;
}
private void timer1_Tick(object sender, System.EventArgs e) //COM�|�[�g���X�g�̎����I�X�V
{
UpdateCOMPortList();
}
private void btnConnect_Click(object sender, System.EventArgs e) //�I�����ꂽCOM�|�[�g���I�[�v������
{
try
{
serialPort1.PortName = lstCOMPorts.Items[lstCOMPorts.SelectedIndex].ToString();
serialPort1.Open(); //COM�|�[�g�I�[�v��
btnConnect.Enabled = false;
lstCOMPorts.Enabled = false;
btnClose.Enabled = true;
txtDataReceived.Clear();
txtDataReceived.AppendText("Connected.\r\n");
}
catch
{
//If there was an exception, then close the handle to
// the device and assume that the device was removed
btnClose_Click(this, null);
}
}
private void btnClose_Click(object sender, System.EventArgs e) //COM�|�[�g�̃N���[�Y
{
btnClose.Enabled = false;
btnConnect.Enabled = true;
lstCOMPorts.Enabled = true;
try
{
serialPort1.DiscardInBuffer(); //���̓o�b�t�@�[�̃f�[�^�j��
serialPort1.DiscardOutBuffer(); //�o�̓o�b�t�@�[�̃f�[�^�j��
serialPort1.Close();
}
//If there was an exeception then there isn't much we can
// do. The port is no longer available.
catch { }
}
private void serialPort1_DataReceived(object sender, SerialDataReceivedEventArgs e) //�f�[�^��M
{
try
{
SetText(serialPort1.ReadExisting());
}
catch
{
//If there was an exception, then close the handle to
// the device and assume that the device was removed
btnClose_Click(this, null);
}
}
private void SetText(string text) //��M�X���b�h���烁�C���X���b�h�ւ̏����o��
{
if (txtDataReceived.InvokeRequired)
{
SetTextCallback d = new SetTextCallback(SetText);
Invoke(d, new object[] { text });
}
else
{
//If this function was called from the same thread that
// holds the required objects then just add the text.
txtDataReceived.AppendText(text);
}
}
private void btnSendData_Click(object sender, System.EventArgs e) //�e�L�X�g�{�b�N�X���̃f�[�^��COM�|�[�g�o�R�ő��M
{
try
{
�@ serialPort1.Write(txtData.Text);
}
catch
{
//If there was an exception, then close the handle to
// the device and assume that the device was removed
btnClose_Click(this, null);
}
}
|
|
| PIC18F4550�|PC ���@�@CDC�N���X�ʐM �@�i ����PIC�L�o�� �{ Microchip����Ӄ\�t�g�j |
�����쌋�ʁ� |
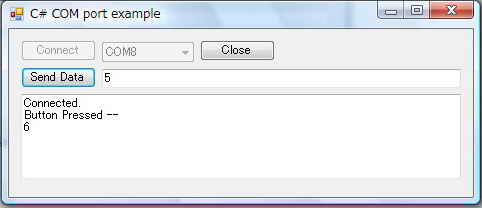
| �@�@�@�@��Ӄ\�t�g�F �@�@�@�@�@�@�@�@Basic Demo �@�R���{�{�b�N�X����COM8�|�[�g��I�� �AConnect�{�^�����N���b�N �@�@�����b�`�e�L�X�g�{�b�N�X��Connected���\������� �BPIC�L�o�����SW�������ƕ����� �@Button Pressed--��USB���M����A���L�E�B���h�E�́@���b�`�e�L�X�g�{�b�N�X�ɕ\�������B �C�e�L�X�g�{�b�N�X��5���L�[�C���āASend Data�{�^�����@�N���b�N����B �@�@��PIC�L�o�����Ł{�P�C���N�������g���ꂽ6��USB�ʐM�ŕԐM����A���ꂪ���L���b�`�e�L�X�g�{�b�N�X�ɕ\������� �@�@�@�@�@�@���S�̂̃n�[�h�@�y��PIC���̃\�t�g �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���@�S�́�PIC���Q�� |
 |
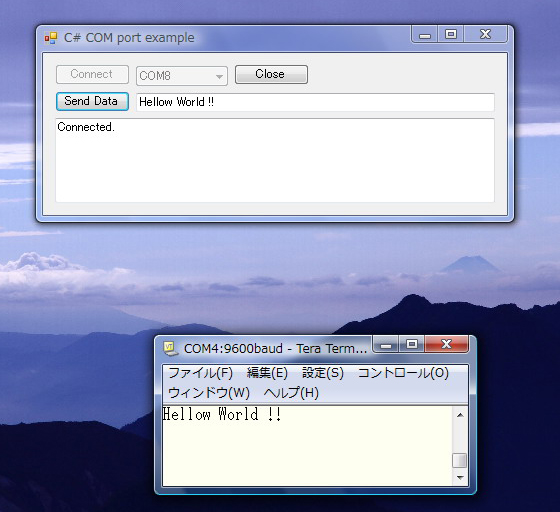
�@�@�@�@��Ӄ\�t�g�F �@�@�@�@�@�@�@�@Serial�@Emulator ���M���iUSB�ʐM�j�FPICDEM�T���v���\�t�g ��M���iRS232C�ʐM)�FTera Term �@�@�@�@�@ �@���L�E�B���h�E�̃e�L�X�g�{�b�N�X�ɕ����� �@Hellow World !!���L�[�C�����āASend Data�{�^�����N���b�N���� �APIC���L�o���iPICDEM��������L�o���j�ł́AUSB�P�[�u���o�R���M����Ă��������̕��������M������A���̕������RS232C�P�[�u���o�R��RS232C�ʐM�ŃG�R�[�o�b�N���� �BPC���ł̓G�R�[�o�b�N����Ă����f�[�^��ʐM�\�t�gTera Term�Ŏ�M���A������E�B���h�E�ɕ\������B �@�@�@�@�@�@�@�@�@�@�@�@ �@�@�@�@�@�@���S�̂̃n�[�h�@�y��PIC���̃\�t�g �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���@�S�́�PIC���Q�� (��)�E�B���h�E�̔w�i�ɂ���摜�́A�{�e�[�}�Ƃ͊W����܂��� |
 |
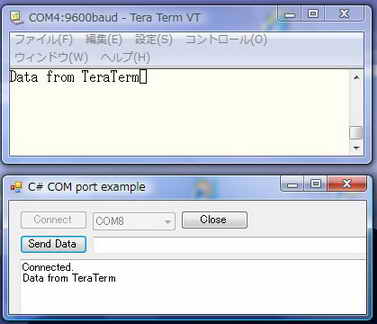
�@�@�@�@��Ӄ\�t�g�F �@�@�@�@�@�@�@�@Serial�@Emulator ���M���iRS232C�ʐM)�FTera Term ��M���iUSB�ʐM�j�FPICDEM�T���v���\�t�g �@Tera Term(��)�Ɂ@Data from TeraTerm�@�ƃL�[�C����A�G���^�[�L�[������RS232C�o�R��PIC���iPICDEM�����j�Ƀf�[�^�𑗐M����B �APIC���ł͎�M�f�[�^�����̂܂�USB�P�[�u���o�R��PC���ɑ��M����B �BPC���ł�PICDEM�f���\�t�g�̉E�L�E�B���h�E�̃��b�`�e�L�X�g�{�b�N�X�Ŏ�M�f�[�^��\������B �@�@�@�@�@�@���S�̂̃n�[�h�@�y��PIC���̃\�t�g �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���@�S�́�PIC���Q�� (��)TeraTerm�̃��[�J���G�R�[��ON�ł���̂ŃL�[�C�������f�[�^���\������Ă���B |
 |
���@PIC18�@CDC�N���X�@�ʐM�@�i�t���t���j�@
�@�@�}�C�N���`�b�v�Ђ�MCHPFSUSB Framework
2.3���_�E�����[�h����Ɠ���ł�����J�\�t�g���x�[�X�ɐv�����APC��PIC18F4550�Ԃ�USB�ʐM�iCDC�N���X �t���t)�̗���Љ�܂��B�@�n�[�h�@�y��PIC���̃\�t�g�́@���������Q�Ɗ肢�܂��@
�@�@�@�@�@�@�@�@�@�@�@�@
������i�d�l��
�@�EPC������f�[�^��PIC����USB�@CDC�N���X�ʐM�ő��M����B
�@�EPIC���ł͎�M������������t����i�ɁA��M�f�[�^�Ɋ�Â��ԐM�����f�[�^���t�����i�ɕ\������B
�@�EPC���ł���M�����f�[�^���e�L�X�g�{�b�N�X�ɕ\������B
�@�EPC������̑��M�f�[�^�@�y��PIC������̕ԐM�f�[�^�͈ȉ��Ƃ���B
�@�@�@�@�@�@�@How
are you ? �@�@�@�@���@�@I am fine !!
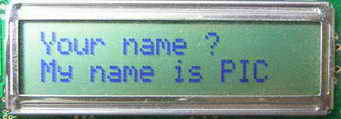
�@�@�@�@�@�A�@Your name ?�@�@�@�@�@�@���@�@My name is
PIC
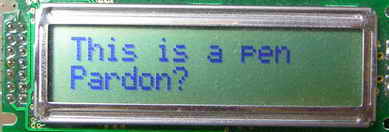
�@�@�@�@�@�B�@This is a pen�@�@�@�@�@�@���@�@Pardon?�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@
| �@�@ | ���v���O������ |
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Windows.Forms;
using System.IO.Ports; //�v�lj�
namespace USB_LCD_Shift_Jis
{
public partial class Form1 : Form
{
//������ϊ�����N���X��錾
Encoding encSjis = Encoding.GetEncoding("shift-jis");
Encoding encUni = Encoding.GetEncoding("unicode");
delegate void SetTextCallback(string text);//�f���Q�[�g�錾
public Form1()
{
InitializeComponent();
UpdateCOMPortList(); //�g�p�\COM�|�[�g���X�g�`�F�b�N
SendData_ComboBox.Items.Clear();
SendData_ComboBox.Items.Add("How are you ? ");
SendData_ComboBox.Items.Add("Your name ? ");
SendData_ComboBox.Items.Add("This is a pen ");
SendData_ComboBox.SelectedIndex = 0; //�R���{�{�b�N�X�I��l�̏����l�ݒ�
}
private void UpdateCOMPortList() //�g�p�\COM�|�[�g�`�F�b�N�@���@���X�g�쐬
{
int i;
bool foundDifference;
i = 0;
foundDifference = false;
if (Port_comboBox.Items.Count == SerialPort.GetPortNames().Length)
{
foreach (string s in SerialPort.GetPortNames())
{
if (Port_comboBox.Items[i++].Equals(s) == false)
{
foundDifference = true;
}
}
}
else
{
foundDifference = true;
}
if (foundDifference == false)
{
return;
}
Port_comboBox.Items.Clear();
foreach (string s in SerialPort.GetPortNames())
{
Port_comboBox.Items.Add(s);
}
Port_comboBox.SelectedIndex = 0;
}
private void CloseBtn_Click(object sender, EventArgs e)
{
CloseBtn.Enabled = false;
ConnectBtn.Enabled = true;
Port_comboBox.Enabled = true;
try
{
serialPort1.DiscardInBuffer(); //���̓o�b�t�@�[�̃f�[�^�j��
serialPort1.DiscardOutBuffer(); //�o�̓o�b�t�@�[�̃f�[�^�j��
serialPort1.Close();
}
//If there was an exeception then there isn't much we can
// do. The port is no longer available.
catch { }
}
private void timer1_Tick(object sender, EventArgs e) //COM�|�[�g�̎����I�`�F�b�N���X�V
{
UpdateCOMPortList();
}
private void ConnectBtn_Click_1(object sender, EventArgs e)
{
try
{
serialPort1.PortName = Port_comboBox.Items[Port_comboBox.SelectedIndex].ToString();
serialPort1.Open(); //COM�|�[�g�I�[�v��
ConnectBtn.Enabled = false;
Port_comboBox.Enabled = false;
CloseBtn.Enabled = true;
Receive_textBox.Clear();
Receive_textBox.AppendText("Connected.\r\n");
}
catch //�@COM�|�[�g���J���Ȃ��ꍇ
{
CloseBtn_Click(this, null);
}
}
private void serialPort1_DataReceived(object sender, SerialDataReceivedEventArgs e) //��M
{
try
{
byte[] byteRead = new byte[serialPort1.BytesToRead]; //��M����
serialPort1.Read(byteRead, 0, serialPort1.BytesToRead);//shift-JIS�ǂݍ���
byte[] byteUni = Encoding.Convert(encSjis, encUni, byteRead); //shift-JIS ����unicode�ɕϊ�����
string strUni = encUni.GetString(byteUni); //�z�����ɕϊ�
SetTextCallback SetTextCallback = new SetTextCallback(SetText);
this.Invoke(SetTextCallback, strUni);
}
catch
{
//If there was an exception, then close the handle to
// the device and assume that the device was removed
CloseBtn_Click(this, null);
}
}
private void SetText(string text) //��M�X���b�h���烁�C���X���b�h�ւ̏����o��
{
if (Receive_textBox.InvokeRequired)
{
SetTextCallback d = new SetTextCallback(SetText);
Invoke(d, new object[] { text });
}
else
{
//If this function was called from the same thread that
// holds the required objects then just add the text.
Receive_textBox.AppendText(text);
}
}
private void SendBtn_Click_1(object sender, EventArgs e) //���M
{
try
{
string strSend = SendData_ComboBox.Text;
if (!strSend.EndsWith("\r")) strSend += "\r"; //���s������������ \r��lj�����
serialPort1.Write(strSend);
}
catch
{
//If there was an exception, then close the handle to
// the device and assume that the device was removed
CloseBtn_Click(this, null);
}
}
}
}
|
�����쌋�ʁ�
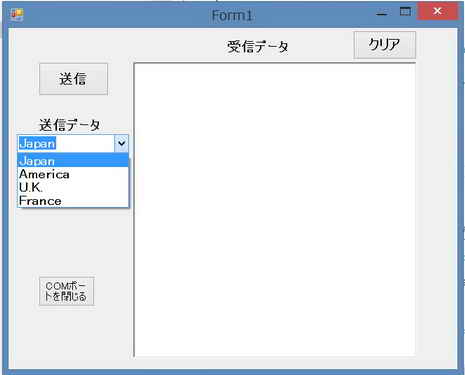
�@�@�@PC���̃E�B���h�E���牼�zCOM�W�|�[�g��I�����Ă�ڑ��{�^�����N���b�N����B
�@�A�@USB�ڑ����������Ď�M�f�[�^�e�L�X�g�{�b�N�X�Ɂ@Connected�@���\�������B
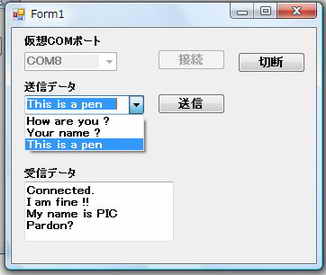
�@�B�@���M�f�[�^�p�R���{�{�b�N�X�X����@How are you ? ��I�����đ��M�{�^�����N���b�N����B
�@�C�@PIC���Ŏ�M������M�f�[�^ How are you ? ���t���̏�i�ɕ\������Ă��܂��B
�@�D�@�ԐM�f�[�^�Ƃ��ā@I am fine !! ���v���O�����őI������A������t�����i�ɕ\������Ă��܂��B�܂��A������PC���ɂ����M����Ă��܂��B
�@�E�@���̌��ʁAPC���ł́@��M�����f�[�^�@I am fine !! ����M�f�[�^�p�e�L�X�g�{�b�N�X�ɕ\�����Ă��܂��B
�@�F�@���l�Ɂ@Your name ? �@�𑗐M�����ꍇ�@My name is PIC�@���ԐM���ꂽ�ꍇ���\������Ă��܂��B
�@�G�@���l�Ɂ@This is a pen �@�𑗐M�����ꍇ�@Pardon? ���ԐM���ꂽ�ꍇ���\������Ă��܂��B
�@
| PC���@ ����M�E�B���h�E |
PIC���@�t����� | |
 |
 |
|
 |
||
 |
���@PIC32MZ�@-�@PC�ԁ@CDC�N���X�@ASCII������̑���M�i�L�����N�^�t���AHarmony�j
PIC32MZ2048ECH144�ɃL�����N�^�t����ڑ����� Harmony�ɂ��CDC�N���X��USB�ʐM ����M�̗���Љ�܂��B�@�@�@���@PIC���@�@�\�t�g
�@�@�@
�@�@������i�d�l��
�@�@�@�@�EPC��PIC32MZ�ԂŁ@������̑���M�������Ȃ��B
�@�@�@�@�EUSB�̃��C�u������Harmony��CDC�N���X����������
�@�@�@�@�EPC�����當����ɑ��ā@PIC�����炻�ꂼ��ɑΉ������������ԐM���邱��
�@�@�@�@�@����M�̕�����́@�ȉ��Ƃ���
�@�@�@�@�@�@PC����̑��M������@�@�@�@�@�@�@�@�@�@�@�@PIC����̕ԐM������
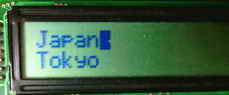
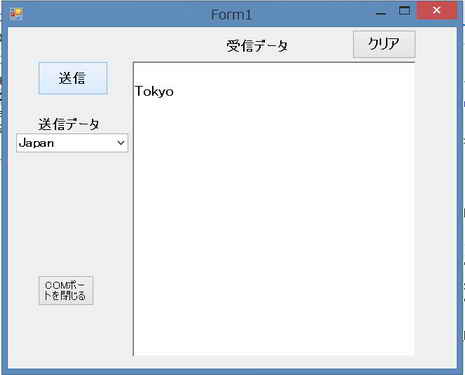
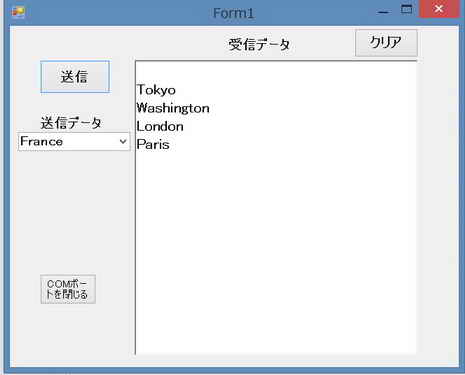
�@�@�@�@�@�@Japan\r�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@Tokyo�@�@�@�@
�@�@�@�@�@�@America\r�@�@�@�@�@�@�@�@�@�@�@�@�@�@Washington
�@�@�@�@�@�@U.K.\r�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@London
�@�@�@�@�@�@France\r�@�@�@�@�@�@�@�@�@�@�@�@�@�@Paris
�@�@�@�@�EPIC�ɂ̓L�������^�t����ڑ����@��M������ƕԐM�������\�����邱��
�@�@�@�@�EPIC���̃_�C�A���O�̃e�L�X�g�{�b�N�X�Ɏ�M�������\���̂���
�@�@�@�@�E�@�J�����@�@PIC���F�@Harmony ver. 1.03 �@ XC32 ver.1.34 �@MPLABX ver.2.35 �@PIC32MZ2048ECH144
revision 5
�@�@�@�@�@�@�@�@�@�@�@�@�@�@PC���F�@VC# 2012
| �@�@�@�@�@ | �v���O���� |
|
�@�@�@ �@�@�@�@�@�@�@�@�@�@ �@ |
�@�����쌋�ʁ�
| PIC���t����� ��i�F�@��M������ ���i�F�@�ԐM������ |
PC��� | |
| ���M�O |  |
 |
| PC����@"Japan\r"�� ���M�����ꍇ |
 |
 |
| PC����@�ȉ��̏��Ԃ� ������𑗐M�����ꍇ "Japan\r" "America\r" "U.K.\r" "France\r" |
 |
 |
PIC32MZ - PC�� �i�f�o�C�X���[�h�jHID�N���X�@
�@�@�@�@IO����iLED��OnOff�ASW�EVR�d���Ǎ�)�@�@�@�iPIC32MZ�]���{�[�h �T���v���\�t�g�j
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�i�T���v���v���O�����iVC#�v���W�F�N�g�t�@�C�� VC# 2017�Łj�@���@�_�E�����[�h�j
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�i�T���v���v���O�����i���s�t�@�C���j�@���@�_�E�����[�h�j
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���@PIC���̃n�[�h�ƃ\�t�g�́@���������Q�Ɗ肢�܂�
���d�l��
�@�@�EPC��PIC�Ԃ�USB�ʐM��HID�N���X�Ƃ���B
�@�@�EPIC��PIC32MZ2048EFH100���g�p�̂��ƁB
�@�@�EPC���̃v���O�����́A�}�C�N���\�t�g��VC++�ō쐬�̂��ƁB
�@�@�EPC���̓_�C�A���O�E�B���h�E���쐬���āA�ȉ������{�ł��邱�ƁB
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�iPC���T���v���v���O�����i���s�t�@�C���j�@���@�_�E�����[�h�j
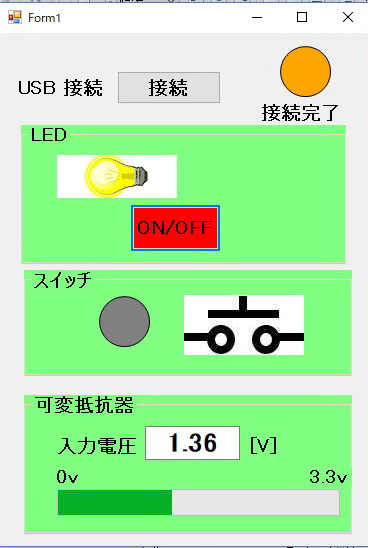
�@�@�@�@�@�@�@PIC����LED��ON/OFF����
�@�@�@�@�@�A�@PIC���̃X�C�b�`�̏�Ԃ̃��j�^
�@�@�@�@�@�B�@PIC���̉ϒ�R��̓d�������j�^
�@�@�E�_�C�A���O�E�B���h�E�̃{�^���X�C�b�`�i�R���g���[���j�̃N���b�N�ɂ��APIC����LED��ON/OFF�ł��邱�ƁB
�@�@�E�{�^���X�C�b�`�̔w�i�F��LED��ON�̏ꍇ�͐ԐF�ALED��OFF�̏ꍇ�͊D�F�Ƃ���B
�@�@�E�{�^���R���g���[����LED��ON�̏ꍇ�͐ԐF�ɁAOFF�̏ꍇ�͊D�F�Ƃ���B
�@�@�ELED��ON�̏ꍇ�͉摜![]() ���@�܂�OFF�̏ꍇ�͉摜
���@�܂�OFF�̏ꍇ�͉摜![]() ��\���̂��ƁB
��\���̂��ƁB
�@�@�EPIC���̃X�C�b�`��ON/OFF��Ԃ������郂�j�^�[�Ƃ��ā@�~�`�̃I�[�o���V�F�[�v�R���g���[�����g�p�̂��ƁB
�@�@�@���A�F��ON�̏ꍇ�̓I�����W�F�AOFF�̏ꍇ�͊D�F�Ƃ���B
�@�@�E�X�C�b�`��ON�̏ꍇ�͉摜 ���@�܂�OFF�̏ꍇ�͉摜
���@�܂�OFF�̏ꍇ�͉摜 ��\���̂��ƁB�摜�͏d�˂Ĕz�u�̂��ƁB
��\���̂��ƁB�摜�͏d�˂Ĕz�u�̂��ƁB
�@�@�EPIC���̉ϒ�R��̓d���l�ɕ\���̂��ƁB�l�͎l�̌ܓ����ď����_�ȉ��Q����\���̂��ƁB
�@�@�E���͓d���l���r�W���A���ɂ킩��悤�Ƀv���O���X�o�[�ł��\���̂��ƁB
�@�@�E�r���ؒf���܂߁AUSB�ʐM��OFF�̏ꍇ��LED,�A�X�C�b�`�A�ϒ�R��ȂǂɌW��\���͍s��Ȃ��悤�ɂ��邱�ƁB
�@�@�EPC�̃A�v���P�[�V������100msec����PIC���̏�Ԃ��T���v�����O�̂��ƁB
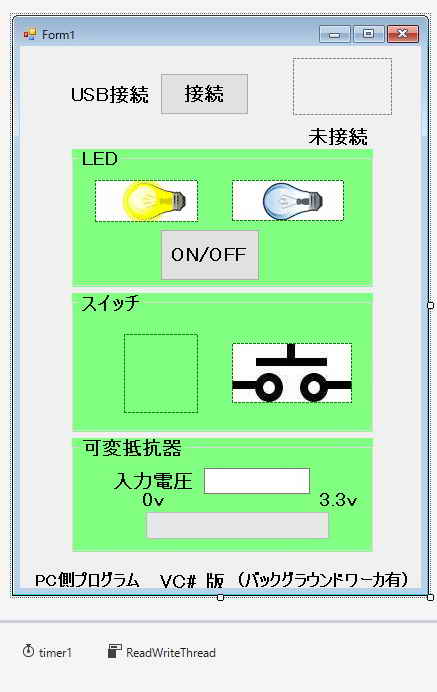
�@�@�E�@PC���̃_�C�A���O�E�B���h�E����ȉ��Ɏ����B�@�@�@�@�@�@
| �@�@�@ |  |
 |
| ��USB�ʐMOFF�̏ꍇ�� | ��USB�ʐM��ON�̏ꍇ�� |
�@�@�@�@�EPIC���̃��j�^�p�t���Ƃ��āAI2C����̃L�����N�^�t����p���邱�ƁB
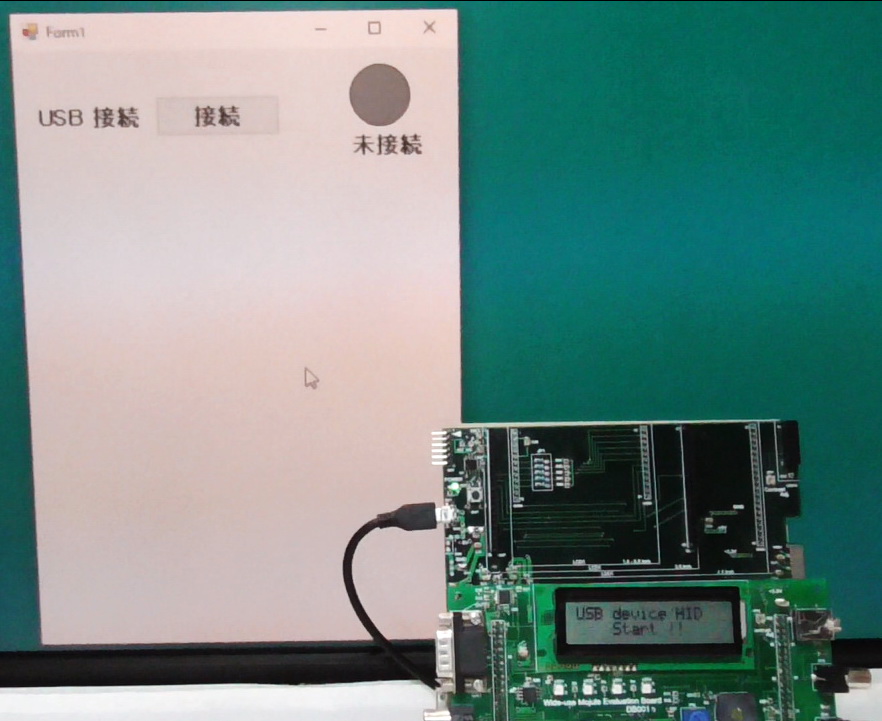
�@�@�@�@�EPIC���N�����鎞�A�L�����N�^�t���ɂ͈ȉ���\���̂��ƁB�@
�@�@�@�@�@�@1�s�ځF�@USB�@device HID
�@�@�@�@�@�@2�s�ځF�@start !!
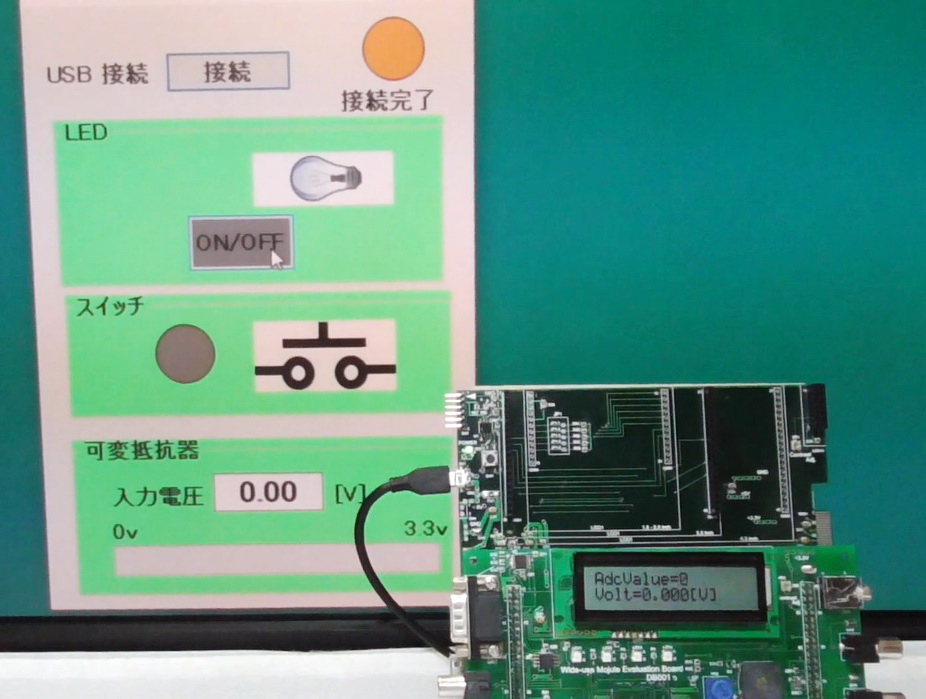
�@�@�@�@�EUSB�ʐM���n�܂�����t���ɉϒ�R��̓��͓d�������j�^����B
�@�@�@�@�@�@1�s�ځF�@AdValue= ���������@�@�@
�@�@�@�@�@�@2�s�ځF�@Volt= ��������[V]
�@�@�@�@�@AdValue�́Z�Z�Z�Z�͓���AD�R���o�[�^�̓ǂݍ��ݐ����l�AVolt�͓d�����Z�l�ŏ����_�ȉ�3����\���̂��ƁB
�@�@�@�@�E�ϒ�R��̓d���̃T���v�����O�^�C����50msec�Ƃ���B
�@�@�@�@�EUSB�P�[�u��������M���ɔ����ꂽ�肵�ĒʐM���ؒf���ꂽ�ꍇ�́@LED�A�X�C�b�`�A�ϒ�R���PictureBox��Disable�ƂȂ�@�_�C�A���O�E�B���h�E��ʂ́@��L�́@��USB�ʐMOFF�̏ꍇ���̉�ʂɖ߂邱�ƁB
�@�@�@
�ȉ��A�v���O��������
| Form1.cs [�f�U�C��] |
 |
| Form1.cs |
using System; |
�����쌋�ʁ��i���@�����F1080����HD��������邱�Ƃ��ł��܂��B�j
�@
| ���[�h | PC��ʁ@���@PIC32MZ�]���{�[�h | ���l�i�����g��A�ڍׁj |
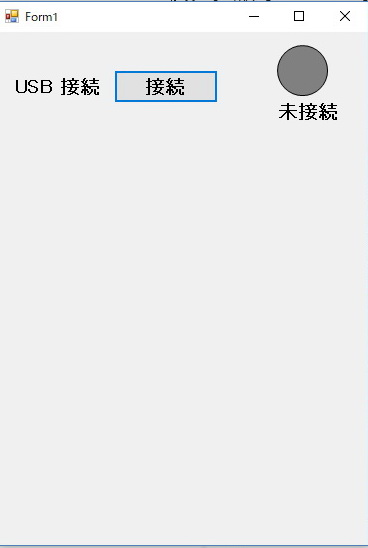
| �@ PC�̌�APIC���N��������Ԃ̎ʐ^�ł��B �@USB�͖��ڑ��̏�Ԃł��B |
 |
 |
| �A �ڑ��{�^�����N���b�N����USB�ʐM���m��������Ԃł��B �@�X�C�b�`��ON/OFF��Ԃ�ϒ�R��̓d���̓��A���^�C�����j�^�����O����Ă��܂��B |
 |
|
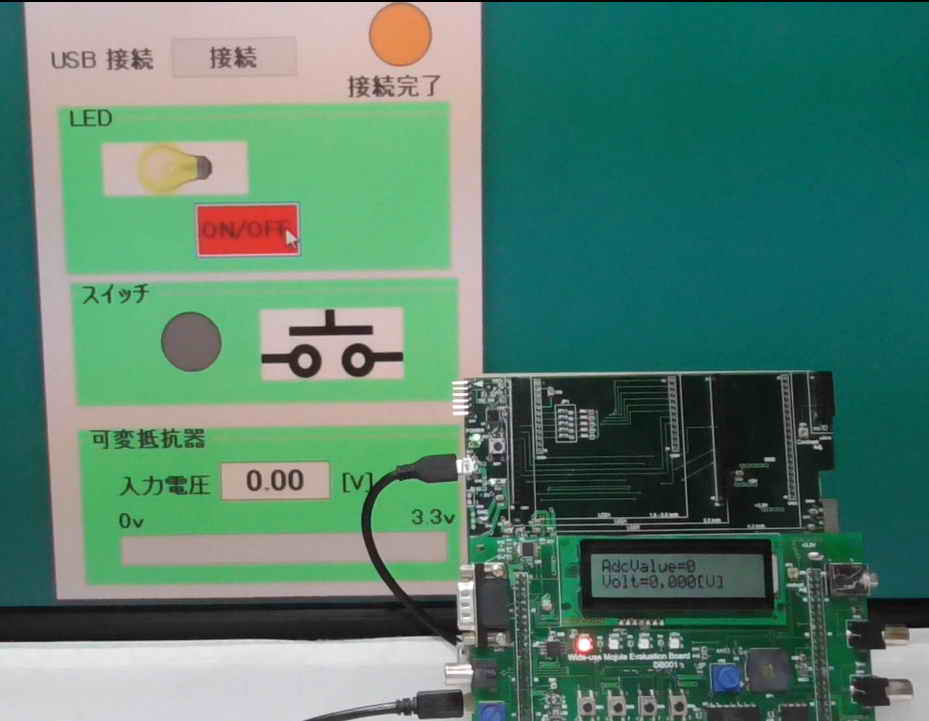
| �B �ڑ��{�^�����N���b�N���ā@LED��ON/OFF�{�^�����N���b�N���邱�Ƃɂ���āAPIC����LED��_����������Ԃł��B ON/OFF�{�^���X�C�b�`���D�F���ԐF�ɕω����āA�����v�̉摜��OFF�̉摜����ON�̉摜�ɕς���Ă��܂��B �@���A�X�C�b�`��OFF�A�ϒ�R��̓d����0v�ł��邱�Ƃ����j�^�����O���Ă��܂��B |
 |
|
| �C PIC���̃X�C�b�`����������Ԃł��B�V�F�[�v�̐F���I�����W�F�ɂȂ��āA�X�C�b�`��ON�̉摜���\������Ă��܂��B | 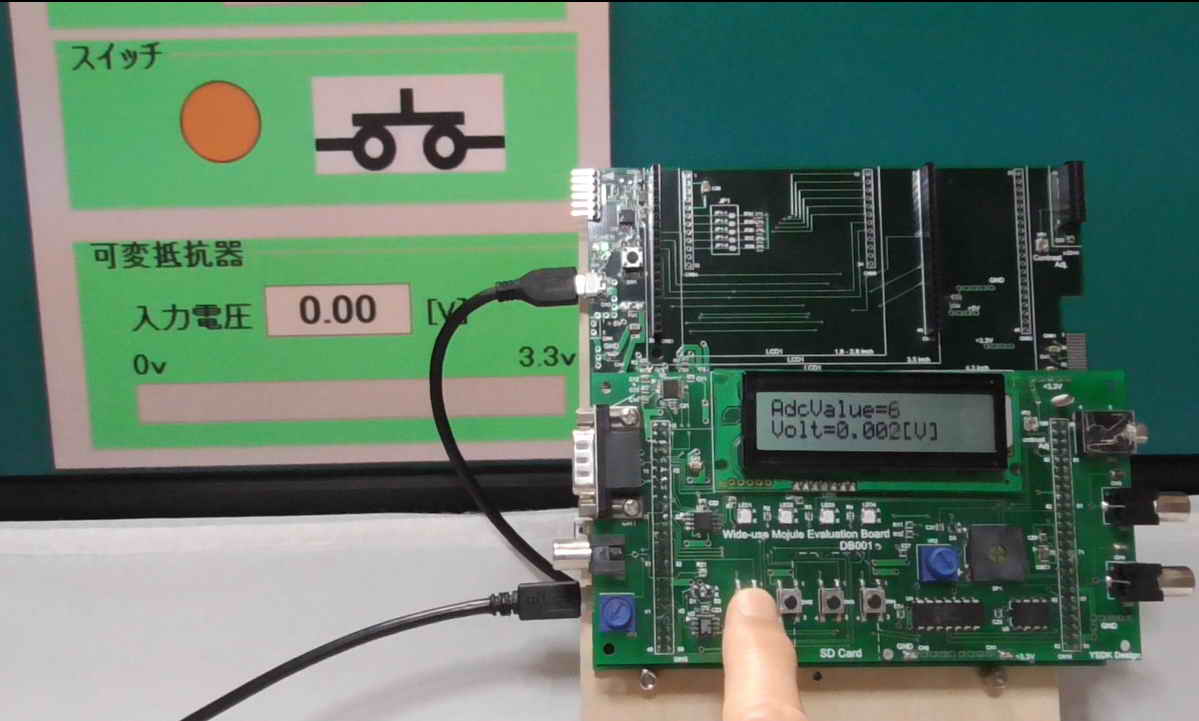 |
|
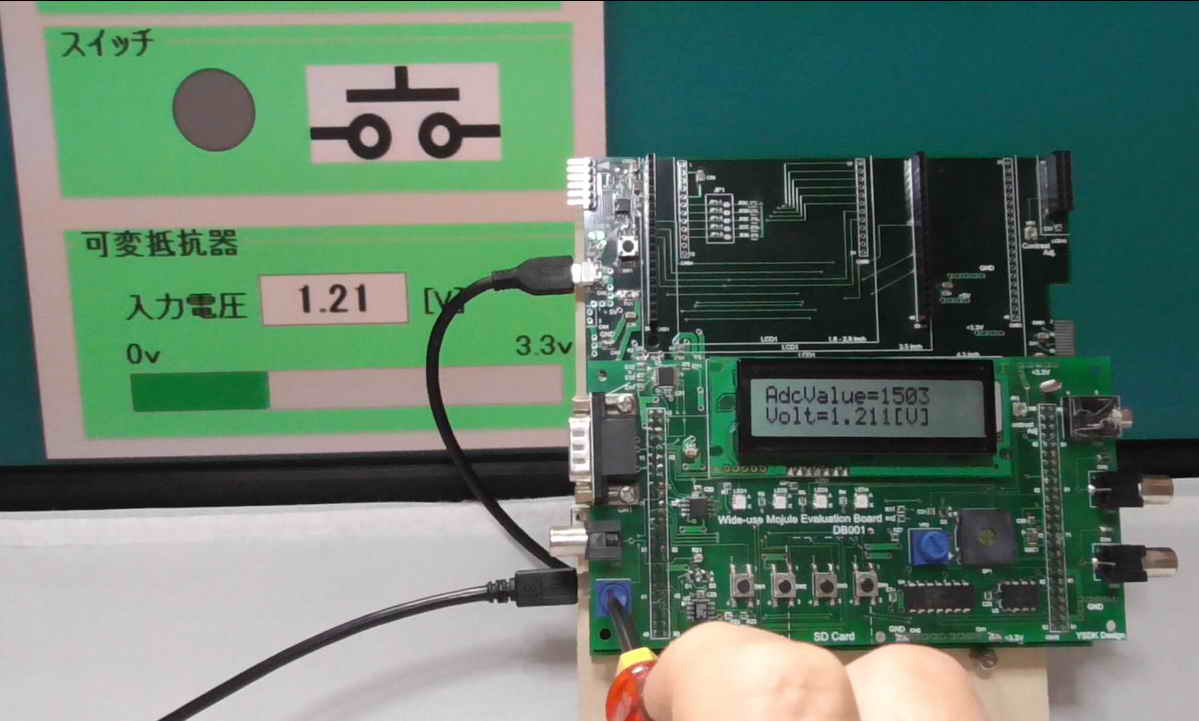
| �D PIC���̉ϒ�R����āA���͓d������1.2���̏�Ԃ̎ʐ^�ł��B�@���͓d���̃e�L�X�g�{�b�N�X�ɂ�1.21�@[V]���\������A�܂��v���O���X�o�[�́A
36.7 (= 1.21/3.3) %�������Ă��܂��B �@�@ |
 |
|
| �E PIC�̓d����OFF�ɂ�����Ԃł��B�@USB�ʐM���Ւf���ꂽ���Ƃ����o���ā@PC�̃_�C�A���O�E�B���h�E��USB�ʐM���m�����Ă��Ȃ���ԂɂȂ��Ă��܂��B |  |
PIC32MZ - PC�� �i�f�o�C�X���[�h�jCDC�N���X�@
�@�@�@�@ ������M�@�@�@�@�@�@�@�@�@�@�@�@�iPIC32MZ�]���{�[�h �T���v���\�t�g�j
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�i�T���v���v���O�����iVC#�v���W�F�N�g�t�@�C�� VC# 2017�Łj�@���@�_�E�����[�h�j
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�i�T���v���v���O�����i���s�t�@�C���j�@���@�_�E�����[�h�j
���@PIC���̃n�[�h�ƃ\�t�g�́A�ȉ����Q�Ɗ肢�܂�
| �O���t�B�b�N�t���� �@�@���x���E�B�W�F�b�g�ւ̕\���@�@ |
�v���O�������� | �@�@�@URL�@�@ | |||
| Harmony Ver2.04 |
Harmony Ver.3 |
||||
| �L | ���x����PC�����USB��M�������\�� |
URL | URL | ||
| �� | USB�i�f�o�C�X���[�h�j�b�c�b�N���XPIC�|PC�� ������M |
URL | URL | ||
���d�l��
�@�EPC��PIC32MZ�Ԃłt�r�a�ڑ��ɂ�镶����̑���M�������Ȃ��B
�@�EUSB�̃��C�u������Harmony��CDC�N���X����������
�@�EPC�����當����ɑ��ā@PIC�����炻�ꂼ��ɑΉ������������ԐM���邱��
�@�@����M�̕�����́@�ȉ��Ƃ���
| �@�@�@�@�@ | PC����̑��M������ | PIC����̕ԐM������ |
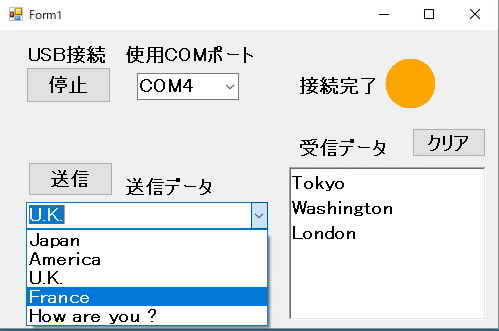
| Japan\r | Tokyo�@ | |
| America\r | Washington | |
| U.K.\r�@ | London | |
| France\r�@ | Paris | |
| How are you?\ | Pardon? |
�@�EPIC�̃L�������^�t����I2C�C���^�[�t�F�[�X�̃L�����N�^�t���Ƃ��A�ȉ���\���̂��ƁB
�@�@�@�P�s�ځ@�c�c�@PC����̎�M������
�@�@�@�Q�s�ځ@�c�c�@PC�ւ̑��M������
�@�EPC���̃A�v���P�[�V�����́@�}�C�N���\�t�g��VC#�ō쐬�̂��ƁB
�@�EPC�̃A�v���P�[�V�����v���O�����̊�{����́A�ȉ��Ƃ���B
�@�@�@���AUSB�R�l�N�^�̒E�������o���@USB�ڑ���ԕ\���i�ڑ�����/���ڑ��@�y�у����v�\���̊D�F/�I�����W�F�j�ɔ��f�̂��ƁB
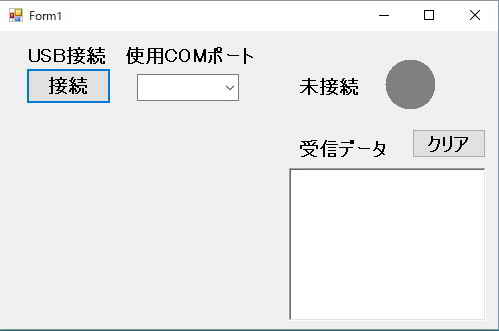
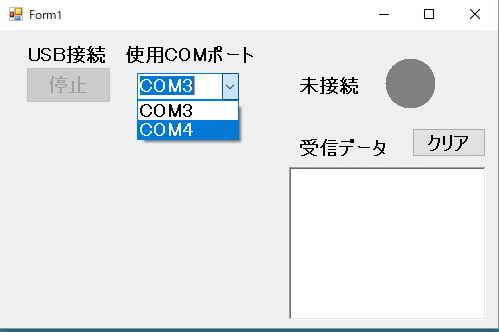
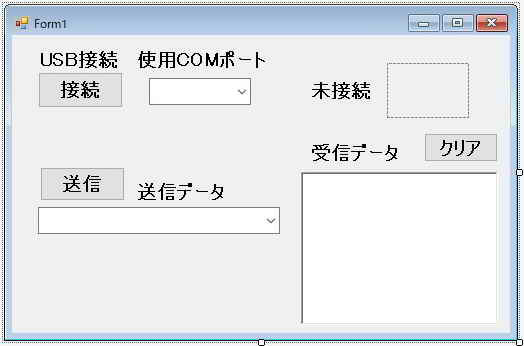
| �@�v���O���������オ���̏������ �@�@USB���ڑ���ԁA |
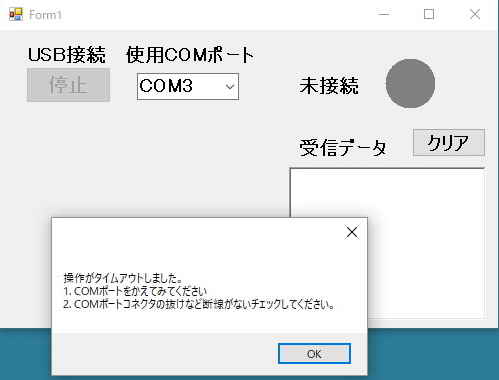
�A�ڑ��{�^����PC�g�p�\COM�|�[�g���������A�g�pCOM�|�[�g�̃R���{�{�b�N�X�ɃZ�b�g����B�Z���N�g���ꂽCOM�|�[�g��PIC����USB�ڑ��ł��Ȃ��ꍇ�́@COM�|�[�g�ύX���𑣂����b�Z�[�W��\������B | �B�R���{�{�b�N�X����ʂ�COM�|�[�g��I������B | |
 |
 |
 |
|
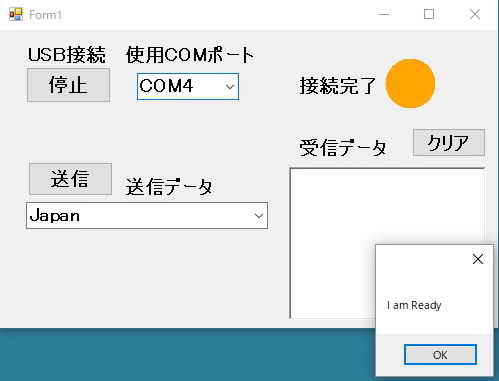
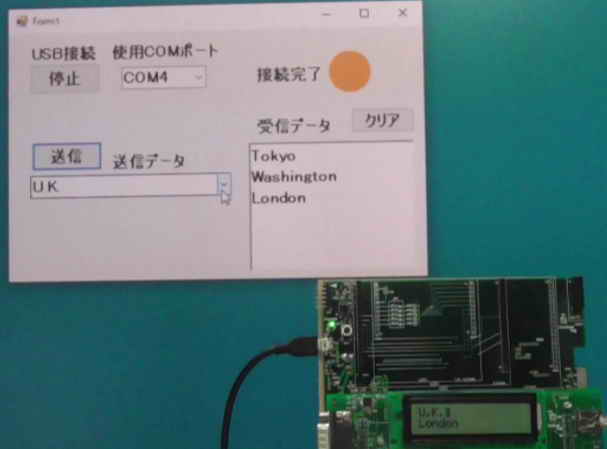
| �C�o�h�b���Ɛڑ��ł����b�n�l�|�[�g��I���ł����ꍇ�͏�������"I am Ready"�̃��b�Z�[�W��\������B�@�܂�����Ɠ����ɑ��M�{�^���A���M�f�[�^�p�̃R���{�{�b�N�X�A"�ڑ�����"�̕����@�y�уI�����W�F�̃����v�\�����s���B | �D���M�f�[�^���R���{�{�b�N�X����I����A���M�{�^�����N���b�N���Ăo�h�b���ɑ��M����B�o�h�b������̕ԐM�f�[�^����M�f�[�^�p�̃��b�`�e�L�X�g�{�b�N�X�ɕ\������B �@���A�\�����ꂽ��M�f�[�^�̓N���A�{�^���ŏ����ł��邱�ƁB |
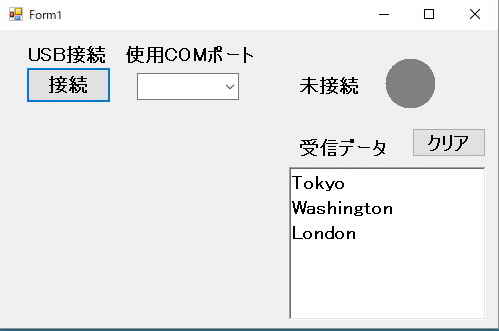
�E��~�{�^�����N���b�N����Ƃt�r�a�ڑ��͎Ւf����邱�ƁB�@����ɔ����g�p�b�n�l�߰Ă͋ƂȂ�A"���ڑ�"�̕������\�����ꃉ���v�\���͊D�F�ƂȂ邱�ƁB | |
 |
 |
 |
�ȉ��A�v���O��������
| Form1.cs [�f�U�C��] |
 |
| Form1.cs |
using System; |
�����쌋�ʁ��i���@�����F1080����HD��������邱�Ƃ��ł��܂��B�j
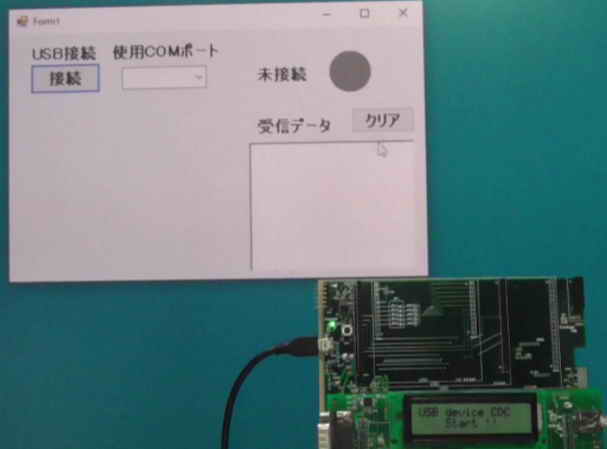
| ����/���� | PC��ʁ@���@PIC32MZ�]���{�[�h | ���l |
| �@�v���O���������オ���̏������ �@�@USB���ڑ���� |
 |
|
| �A�ڑ��{�^����PC�g�p�\COM�|�[�g���������A�g�pCOM�|�[�g�̃R���{�{�b�N�X�ɃZ�b�g����B�Z���N�g���ꂽCOM�|�[�g��PIC����USB�ڑ��ł��Ȃ��ꍇ�́@COM�|�[�g�ύX���𑣂����b�Z�[�W��\������B | 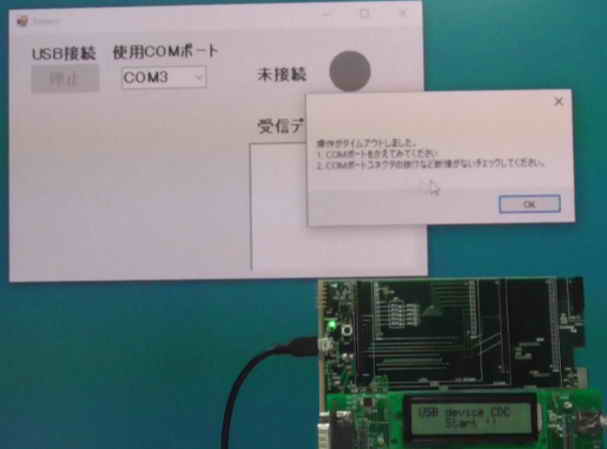 |
|
| �B�R���{�{�b�N�X����ʂ�COM�|�[�g��I������B | 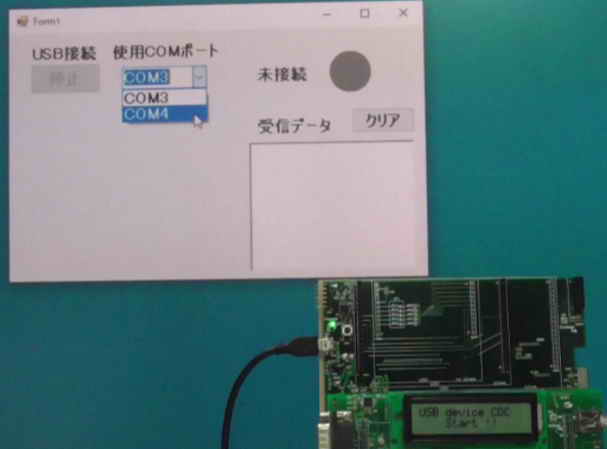 |
|
| �C�o�h�b���Ɛڑ��ł����b�n�l�|�[�g��I���ł����ꍇ�͏�������"I am Ready"�̃��b�Z�[�W��\������B�@�܂�����Ɠ����ɑ��M�{�^���A���M�f�[�^�p�̃R���{�{�b�N�X�A"�ڑ�����"�̕����@�y�уI�����W�F�̃����v�\�����s���B | 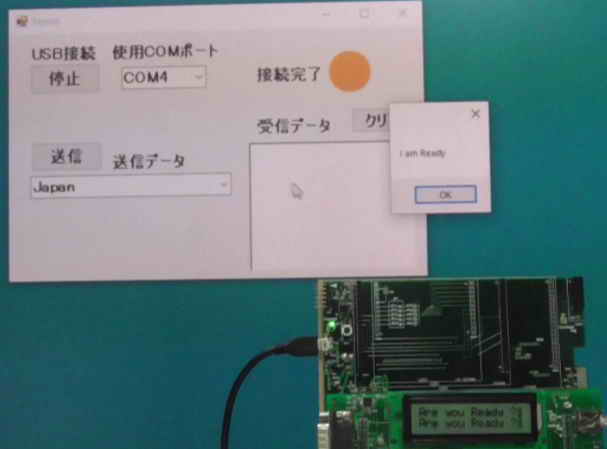 |
|
| �D���M�f�[�^���R���{�{�b�N�X����I����A���M�{�^�����N���b�N���Ăo�h�b���ɑ��M����B�o�h�b������̕ԐM�f�[�^����M�f�[�^�p�̃��b�`�e�L�X�g�{�b�N�X�ɕ\������B �@���A�\�����ꂽ��M�f�[�^�̓N���A�{�^���ŏ����ł��邱�ƁB |
 |
|
| �E��~�{�^�����N���b�N����Ƃt�r�a�ڑ��͎Ւf����邱�ƁB�@����ɔ����g�p�b�n�l�߰Ă͋ƂȂ�A"���ڑ�"�̕������\�����ꃉ���v�\���͊D�F�ƂȂ邱�ƁB | 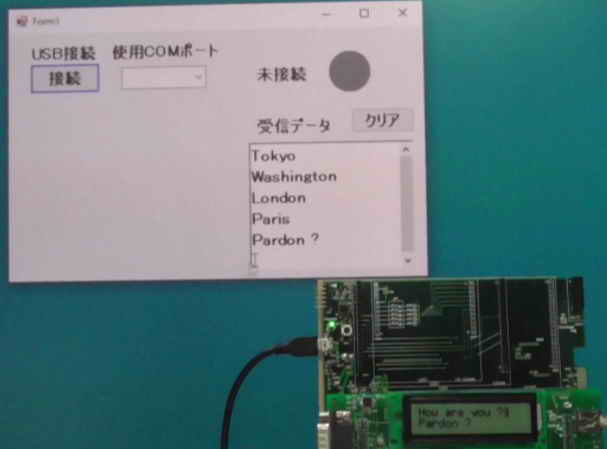 |
|
| ���ׂĂ�Windows���b�Z�[�W��WndProc���\�b�h�ŃC�x���g�ɒu����������킯�ł͂���܂���B���v�̃C�x���g�����o����ɂ� WndProc���\�b�h���I�[�o�[���C�h����Windows���b�Z�[�W�Ŕ��ʂ��܂��B �@ �����̌��ʁ@DBT_DEVICEARRIVAL / DBT_DEVICEREMOVECOMPLETE�ł́@USB�������ƃ}�C�N���`�b�v��USB(�f�o�C�X���[�h�j CDC�N���X��USB�R�l�N�^�E�������o�ł��܂����B�@�������@USB�ڑ��̃L�[�{�[�h��}�E�X�� USB�R�l�N�^�E���͌��o�ł��܂���ł����B USB�R�l�N�^�̒E���C�x���g�𐳊m�Ɏ擾�������ꍇ��Windows���b�Z�[�W�ɌW�鎑���ǂ���K�v������܂��B |
���s���� |
using System; |
 ��USB�����������o���い �y�с��N���い  ��USB�������}���い |
![]() �@�@�@�@�@�@
�@�@�@�@�@�@![]()